

大家好,今天小编关注到一个比较有意思的话题,就是关于多久调用一次pid算法的问题,于是小编就整理了3个相关介绍的解答,让我们一起看看吧。
pid采样时间设置多少合适?
半分钟或一分钟合适。
PID就是通过系统误差利用比例、积分、微分计算出控制量进行控制的。不同厂家的公式稍有不同,但是基本上都离不开三个参数:比例、积分时间、微分时间。
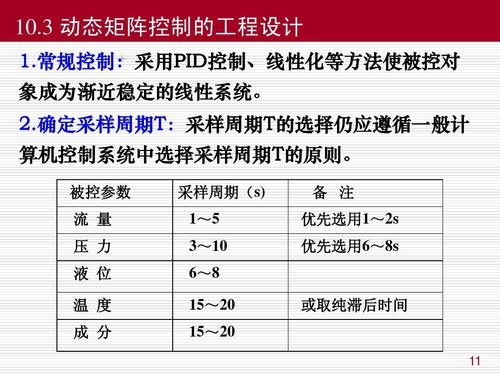
采样周期
在进行PID调节之前要先设定好PID的采样周期,采样周期设定主要根据被控对象的特性决定。被控对象变化快的(如:流量),可将采样周期设定在100ms左右,采样周期变化慢的(如:液位)可将采样周期设定在1000ms,对于特别缓慢的(如:温度)可设置成5-10S。简单的理解是多长时间比较一次采样值与设定值。
当然需要注意的是,采样周期必须大于程序的执行周期(PLC的运行周期)。
增量式pid公式是什么?
PID的增量型公式:
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】
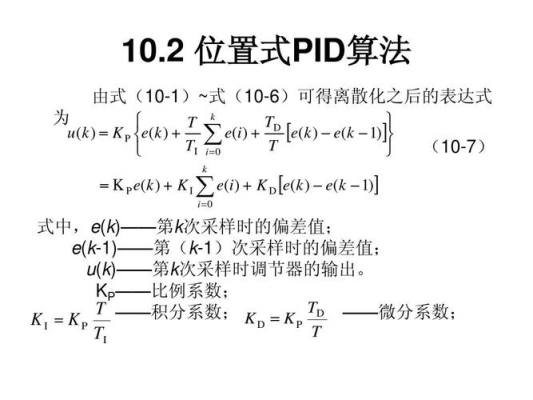
PID算法具体分两种:一种是位置式的 ,一种是增量式的。
位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
PID控制原理:
本系统通过摆杆(辊)反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
PID系统特点:
1、主驱动电机速度可以通过电位器来控制,把S350设置为SVC开环矢量控制,将模拟输出端子FM设定为运行频率,从而给定收卷用变频器的主速度。
2、收卷用S350变频器的主速度来自放卷(主驱动)的模拟输出端口。摆杆电位器模拟量
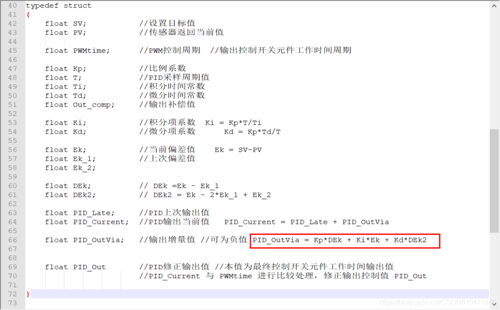
增量式PID计算公式:
P=Kp*(current_error﹣last_error);
D=Kd*(current_error﹣2*last_error﹢prev_error);
I=Ki*current_error;
PID_add=Pwm_value+P﹢I﹢D; 就是对输入偏差进行比例积分微分运算,然后将运算的叠加结果去控制执行机构。
温度控制的PID算法程序如何编写?
IDpara.d_mode = LCPID_D_MODE_E ;
微分模式:对偏差值进行微分计算(标准PID控制);
X模式:对实际值进行微分计算(一般选次方式)PIDpara.calc_mode= LCPID_CALC_MODE_EXACT ;
计算模式:精确(所有计算为双精度浮点型, 如无舍入错误和CPU计算次数过长)(一般选次方式)PIDpara FUB LCPIDpara() ;
调用PID参数功能块循环程序中程序如下,此程序只对P、I、D三个参数由变量进行输值,变量可在pid程序运行中实时修改,如果大家还需要某些参数实时修改,方法相同:(* cyclic program *)PIDpara.。
到此,以上就是小编对于pid多久采样一次的问题就介绍到这了,希望介绍的3点解答对大家有用。







